回転行列 : 数学
回転行列のメモ。
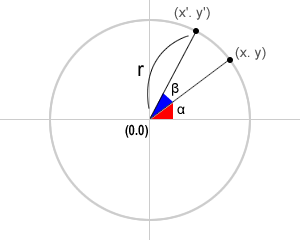
中心(0, 0)・半径rの円を考える。
2次の回転行列
原点(0,0)を中心に座標(x,y)に対して角度βだけ回転した得られる座標(x’,y’)は下記の式により求めることができる。
x' = cosβ·x - sinβ·y y' = sinβ·x + cosβ·y
行列を使って表す。
[x'] = [cosβ -sinβ][x] [y'] = [sinβ cosβ][y]
係数行列を回転行列と呼ぶ。
[cosβ -sinβ] [sinβ cosβ]
同様に-β回転させる回転行列は次のようになる。
[cosβ sinβ] [-sinβ cosβ]
導出方法
x = rcosα,y = rsinα ---(1) 加法定理 cos(α+β) = cosαcosβ - sinαsinβ ---(2) sin(α+β) = sinαcosβ + cosαsinβ ---(2') x' = rcos(α+β) y' = rsin(α+β) (2),(2')より x'= r(cosαcosβ - sinαsinβ) y'= r(sinαcosβ + cosαsinβ) x' = rcosαcosβ - rsinαsinβ y' = rsinαcosβ + rcosαsinβ (1)より x' = xcosβ - ysinβ y' = ycosβ + xsinβ = xsinβ + ycosβ
3次元の回転
3次元の回転は、回転軸に応じて3種類ある。
回転軸の座標が固定されるため、2次元の回転と同じ行列が使える。
[cosβ -sinβ] [sinβ cosβ]
X軸に沿ったに回転行列
y' = ycosβ - zsinβ z' = ysinβ + zcosβ
Y軸に沿った回転行列
z' = zcosβ - xsinβ x' = zsinβ + xcosβ
Z軸に沿った回転行列
Z軸の回転は2次元(XY平面)の回転に対応
x' = xcosβ - ysinβ y' = xsinβ + ycosβ
ActionScritのサンプル
コメント
No comments yet.
コメントの投稿
改行と段落タグは自動で挿入されます。
メールアドレスは表示されません。